What just happened? Researchers at the University of Manchester have cracked the code on building a super-powered jumping robot that could soar over 120 meters into the air – way higher than the Statue of Liberty or London's Big Ben tower. That's a huge leap compared to the current world record holder for the highest jumping robot, which can "only" reach up to 33 meters.
This target was achieved by combining mathematics, computer simulations, lab experiments – and of course, some old-fashioned tinkering to optimize the ideal robot size, shape, and part layout.
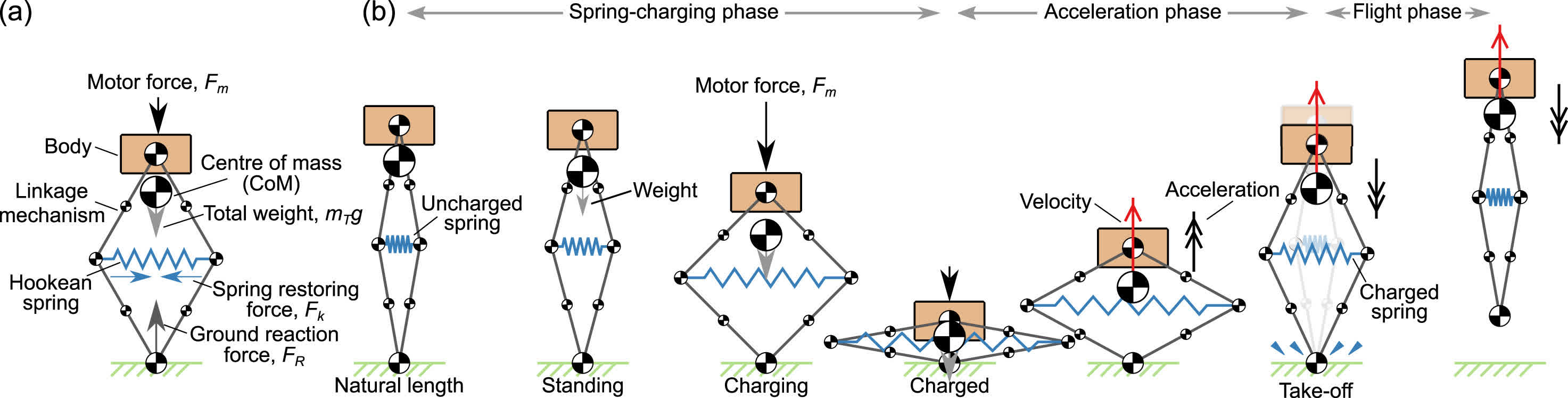
According to the study published in the journal Mechanism and Machine Theory, traditional jumping bots tend to be pretty inefficient, wasting energy on unintended motions besides just going straight up. They either take off too soon before fully extending their power-springing legs, or they veer off-course with sideways slides or spins that reduce momentum.
"While jumping robots already exist, there are several big challenges in the design of these jumping machines, the main one being to jump high enough to overcome large and complicated obstacles. Our design would dramatically improve the energy efficiency and performance of spring-driven jumping robots," co-author Dr John Lo, Research Associate in Space Robotics at The University of Manchester said in a statement.
The researchers decided to take a whole new approach. First, they analyzed two different jumping mechanisms to see which worked best – one with a straight line "prismatic" piston-style leg motion, and another with a rotational kangaroo-kick type of joint. As it turned out, both had their pros and cons.
The piston model was weighing itself down with too much bottom-loaded mass, causing an inertial delay before liftoff. Meanwhile, those spinning rotational legs were robbing energy by launching the bot before the springs had released their full energy.
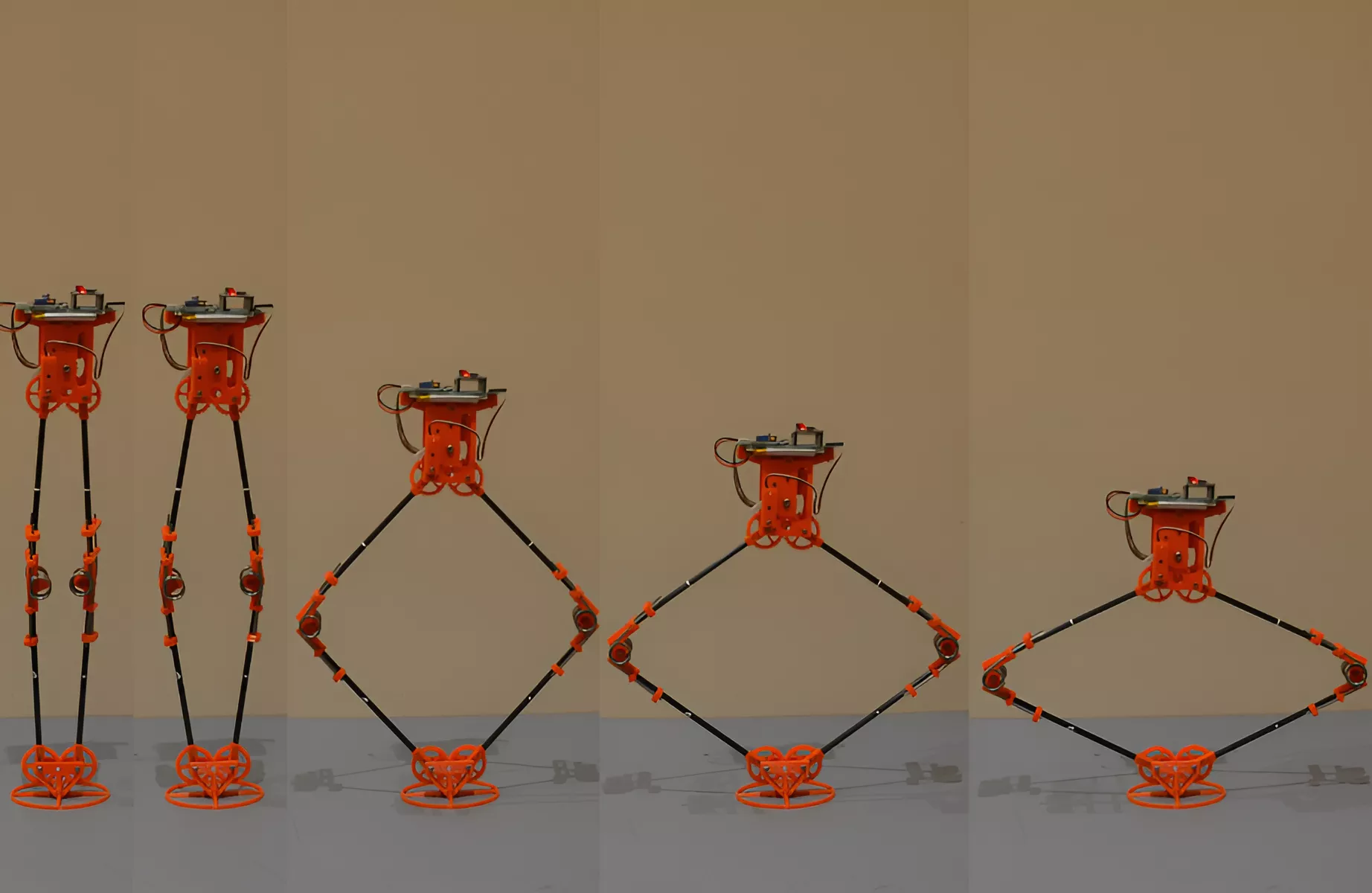
By combining the most optimal elements of each design though, the team found a sweet spot: Shift most of the weight up top for stability and use long straight linear-extending legs to prevent premature departure.
Now that the team has nailed the launch, the next goal is to control the direction of the jumps while also improving the number of times it can take off on a single charge. This, the scientists say, can be done by harnessing the kinetic energy generated from landings – which should be significant considering the bot would be hitting the ground from a height of over 100 meters.
The potential applications are massive. Imagine future jumping robots assisting with search and rescue operations by vaulting over wreckage or blazing new trails for planetary exploration by bounding across alien landscapes. For space, the team plans to explore more compact designs that'd make the bot easier to transport and deploy.